Science Vetal
Shows how to make a robot vacuum cleaner. It automatically avoids obstacles and vacuums, while collecting pieces of paper and crumbs of various origins.
You need a standard set for an arduino machine. We take one arduino uno, l298n motor driver, proximity sensor, old fan and computer system unit. First, I took a thick corrugated cardboard, tore out a picture of a circle, installed a fan, size. Started cutting. The size of the octagon should be slightly smaller than the fan. Then I took the fan and tried to insert it into the hole. I thought the outline would stretch a little. But that didn't happen. I trimmed it a little and only after that I was able to install the fan. The height of the fan above the table should be small, about 0.5 cm. Only then will it suck up dust well. Then I installed the engines and glued everything in place using hot glue. Including a fan. It needs to be glued after the motors are installed in order to see the required height. Practice has shown that debris will be sucked in well if the height above the table is from 0.5 to 1 cm. Then I started installing another wheel so that the system would stand on three wheels. The third wheel will not rotate.
All elements of the vacuum cleaner are attached using hot-melt adhesive. For such a device, such strength is sufficient.

Cachaça suction of debris depends on the speed of work, it should not be high. Eyes need to be inserted. We use an ultrasonic sensor for arduino.
The button was installed on the side, but practice has shown that this is not entirely the right decision, because the robot turned itself off several times. He hit the wall with that particular button. In principle, this is not quite a classic vacuum cleaner, because a box is usually used. And here it stands directly for suction. But this does not degrade the performance. Please note that the master took an ordinary fan, not intended for sucking. He's just blowing air. Therefore, if you want to create a vacuum cleaner that will suck not only paper, then you need to install a more powerful motor. And give the blades the configuration necessary for the vacuum cleaner. The entire process of creating the robot took about 3 hours. As you can see, there is nothing complicated. The most difficult thing in this matter is programming. In this case, the master programs only a little. He took his car, which avoids obstacles, and modified it slightly to limit the robot's speed. To do this, I used PWM pins on the arduino and connected them with the corresponding pin on the motor driver. By the way, it is not such a small radiator calculation. But it has a big advantage compared to other motor drivers. Namely, the output is 50. They are very convenient for servos and also arduino. If you don't like the large size of this driver, you can simply remove the heatsink from there. The fact is that when using these two engines, it does not heat up much. The temperature does not rise above 40 degrees. The circuit receives power from the battery via a switch and a nano motor driver. A fan is also connected here.
Automated vacuum cleaner with autonomous source nutrition, of course, does not develop such as manual option. Practical tests have shown greater efficiency using a small brush in conjunction with a suction turbine. For cleaning corners The front part of the vacuum cleaner is equipped with 2 brushes, which, during operation, sweep debris towards the main one.
The robotic system can be powered from several batteries, the voltage at the terminals of which is 12 V (18 V), and its capacity is 7 Ah. Charging is carried out by direct contact or wirelessly. The use of the latter increases the cost of components.
Returning a robot to its charging location on its own is a difficult task that can be solved by installing a transmitting beacon.
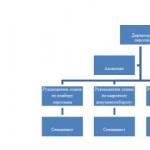
Any automated model is assembled controller based(brain of the system). Therefore, you should study its programming language to enter the command algorithm. You should also take into account the intuitive nature of the command interface, which greatly simplifies the process. Both the microcontroller and the sensors used often have standardized connections, so soldering is rarely required.

Preparation for practical implementation of the project
Let's consider the application of the above principles based on the Arduino Mega 2560 platform. The creation process will consist of several stages:
- preparation of tools and materials;
- production of a housing with wheels and a compartment for garbage, a dust collector and a turbine;
- installation of sensors and microcontroller, motors with gearboxes, batteries, brushes;
- making electrical connections;
- introducing a program into Arduino, determining sensor consistency;
- checking the performance of the robot vacuum cleaner and its ability to charge independently.
The idea is implemented using the following materials and tools:
- Arduino controller – 1 piece, with drivers;
- sheet of plywood (or thick cardboard) – 1 sq.m.;
- wheels – 3 pcs;
- wire with a cross-section of no more than 0.75 mm2 (twisted pair is suitable) - about 2 m;
- power supply – 4 18 V batteries, charge indicator, charger;
- infrared sensors – 4 pcs., contact sensors – 2 pcs.;
- electric motors: for the turbine – 1 piece, rotating the brush – 1 piece, 2 motors with a gearbox provide movement;
- polyvinyl chloride body – 1 piece;
- glue – 1 pack, screws – 10 pcs, tape – 1 pc, set of magnets;
- a set of screwdrivers and drills, pliers, a stationery knife, pencil, ruler, screwdriver, jigsaw.
Assembling a robot vacuum cleaner
Having prepared everything you need, you can begin assembly. It consists of going through the stages described above.

An important point in the work is the return of the bumper to its original position after hitting an obstacle, that is, its sufficient elasticity.
All parts are secured to the connectors available for these purposes with self-tapping screws or glue or tape. The result obtained is shown in the photograph:

Cleaning is a troublesome task and can sometimes take a lot of time, but everyone wants their apartment or house to be clean, well-groomed and tidy. There are often situations when you just tidy up all the rooms, vacuum, put everything in its place, but then after a couple of hours the first crumbs, dust and other debris appear on the floor, and you don’t always want to repeat this procedure again. It was for such an occasion that the world was presented robot vacuum cleaner.
Robot, fully automatic, copes well with small debris that so often gets boring. However, the cost of the device is sometimes insultingly high, but this is not a problem at all, a do-it-yourself robot vacuum cleaner, copes well with assigned tasks.
Basic requirements for creation
- The vacuum cleaner created should be cylindrical in shape and not very tall (it needs to fit under bedside tables, tables, etc.).
- Select the wheel diameter taking into account the possibility of self-rotation.
- The wheel responsible for “steering” does without a motor.
- The contact bumper is a very important component; you cannot do without it; it is also necessary to take into account that it must occupy at least half of the perimeter of the entire robot.
- For a robot, ideal grip can be achieved if the center of gravity coincides with the wheels.
- The maximum practicality of the garbage disposal, it should be removed in one motion.
Basic movement algorithms:
will do its job perfectly, only with the correct movement algorithm. The main algorithms (those that have shown maximum efficiency) only two: movement in a spiral, increasing from the center of the room to its edges, or zigzag movements from one side of the room to the other.The ideal trajectory of these movements is built in ideal conditions without taking into account obstacles. Therefore, for each room you should choose one of the presented movement options.


Do-it-yourself robot vacuum cleaner - quality cleaning
Robot made with my own hands, of course, cannot be compared with a full-fledged vacuum cleaner in terms of cleaning quality, however, such a device copes well with small and annoying debris, especially if you additionally equip the vacuum cleaner with brushes and special attachments that can suck up dirt from corners and other hard-to-reach places.
The power of such a unit
The robot adjusts itself, the speed and power of the motor depends on you. The optimal speed of such a unit is in the range of 25-30 cm/sec; it is not too high, but not too slow for collecting garbage and the battery is enough for a large area of work.
For work, it is best to use stepper motors; they will not “take away” excess power from the motors and charge from the battery; with such motors, the transmission of torque can be direct or through special belts.
Sensors
Any robot vacuum cleaner is equipped with different sensors and also does not deviate from these dogmas. Such a device must have infrared sensor, it will not allow the robot to scratch the walls or fall down the stairs, even if for some reason they do not work, then there are always sensors on the bumper that stop the device a few centimeters from the obstacle. Next, there are sensors for stopping work; they are installed on the wheels, so when lifting, the robot will turn off automatically. More complex models can use return to base sensors to recharge the battery.


Became a top seller and remains there for a long time, making life easier for many people.
Is it true, indispensable assistant- expensive pleasure. Therefore, resourceful engineers assemble robotic vacuum cleaners on their own, and equip them additional functions and upgrade the design.
For those who are too lazy to clean the apartment, but are not too lazy to assemble a robot vacuum cleaner, we have prepared detailed instructions for this.
Required materials
- corrugated cardboard from under an old vacuum cleaner, because you won’t need it anymore;
- ruler and marker - measure and draw seven times;
- stationery knife, scissors and glue - cut once and glue several times;
- a sheet of felt - the bristles of a brush that can collect 99.9% of dust and debris in your home;
- Chinese stick - the axis of the same brush;
- on/off button from under table lamp- it will turn on the device (the lamp will have to be sacrificed to the gods of purity and robotics);
- Arduino gear motor with power wires - so that the brush rotates independently, and not with the help of your hands;
- a battery or a Krona battery, which will give strength to the gear motor to rotate the brush;
- lids from under plastic bottles Coca-Cola/Fanta/Sprite or any other favorite drink (8 pcs.) - no, this is not a promotion, but a way to move the robot vacuum cleaner;
- wrapping paper, felt-tip pens, paints, etc. - for non-standard design solutions.
Assembling a robot vacuum cleaner. Home Edition
So, if you have all the materials at hand, it’s time to start assembling the robot vacuum cleaner. Before you start, we recommend watching this: it clearly demonstrates the process.
Now let’s write down all the stages for greater clarity.
1. Take cardboard and draw bending and cutting lines according to the dimensions indicated in the video.
2. Bend and cut. Congratulations - the base of the robot vacuum cleaner is ready!
3. Take a sheet of felt and cut it into short strips. You should try to make them the same size. We collect them in a pile and put them aside, but not far away.
4. Cut off the sharp edge of the Chinese stick, thereby turning it into a regular stick. More precisely, in the axis of rotation of the vacuum cleaner brush.
5. We return to the pile of cut pieces of felt and carefully glue them one by one to the resulting axis.
6. Make a shallow hole at one end of the axle.
7. Take the gear motor, lubricate the tip with glue and insert it into the hole made in the former Chinese stick.
8. Congratulations again - the brush is ready! Carefully cover the microcircuit with glue and attach it to the cardboard base.
9. Using the twisted pair we prepared just in case, we connect the motor power wires to the power button and battery. We put it in a special compartment, as shown in the video.
So, we can congratulate you for the third time, because The robot vacuum cleaner is actually ready! All that remains is to attach wheels to it and decorate it as you wish.
You will need drink lids for the wheels. Making wheels out of them is very simple: two covers - one wheel. Just glue them together and get a rotating element. You need to make a hole in the center of the wheel covers and insert the prepared nails into it, and then attach them to the structure. This stage is also shown in the video.
All that remains is to decorate your assistant. Here, instead of instructions, you will receive from us only parting words: just let your imagination take flight! Robot in hi-tech style, with the Samsung logo or with puppy eyes? Great! After all, this is your personal assistant for cleaning your home!
P.S. We are not sure that after reading this article you will still assemble your own robot vacuum cleaner. But we hope that you received a lot of positive emotions. However, if you set a goal, you will certainly be able to construct a real, super-powerful destroyer of any kind of dirt - after all, the model from the video really is.
In the modern pace of life, it is not always possible to keep the house clean. It will help in this matter modern technologies. The robot vacuum cleaner appeared more than 15 years ago. Its typical appearance resembles a large puck that moves around the room according to a given algorithm or randomly (until it hits something) and collects garbage. We invite you to study 2 step-by-step instructions to make a robot vacuum cleaner with your own hands.
Assembly materials
So, to assemble a robot vacuum cleaner you need to understand its components, let's go in order. It must move around the room on its own, so motors are needed, depending on the final design there should be from 2 to 4 of them, as well as the ability to switch the direction of rotation and speed, which means a board is needed to control the motors. If you are using DC motors, then you need a board with 4 transistors (H-bridge).
Homemade robot-the vacuum cleaner must detect collisions with walls and furniture. To do this, you need to provide obstacle sensors and limit switches on the “bumper”. You also need the working part itself – a vacuum cleaner. However, it must be designed to operate on low voltage direct current (for example, 12V).
In addition to a vacuum cleaner, you need a movable (rotating) brush that will clean the surface, lift the pile of the rug, and sweep away debris. For this you need one or two more motors.
A system that will manage all this. The simplest option on Arduino. Any of the boards is suitable for this task; the size is convenient to accommodate the Nano or Pro mini option.
Idea No. 1: robot vacuum cleaner made of cardboard
The base of the robot is made of thick cardboard. It is better to glue it in a couple of layers, and place the fibers perpendicularly. For its technical filling you need the following set of parts:
- Any Arduino board.
- Breadboard or simple development board, in principle, you can do it without it, just solder everything together.
- 2 ultrasonic distance sensors (range finder).
- Turbine from a vacuum cleaner.
- A small engine or cooler from a computer.
- Motors with gearboxes and wheels.
- Controller for motor.
- Wires for circuit connections.
- Batteries and charge controller.
The robot must be powered by 3 lithium batteries. The voltage of each of them is 3.7 V. A controller is needed to charge them. For example, like the one in the photo:

To control the robot drive motors, it is convenient to use a module based on the L298 chip. Circuit design is an H-bridge; you can assemble it yourself from individual components, but it will be safer to buy a ready-made board. With it, you can set the speed of the robot vacuum cleaner and change the direction of rotation.

To adjust the speed, a PWM signal is supplied to the ENA or ENB pin, and to set the direction of rotation, opposite signals are supplied to IN1 and IN2 for one motor and IN3, IN4 for another motor. Moreover, if we have a logical one on the IN1 pin, and a logical zero on the IN2 pin, the motor rotates in one direction, to change the direction you need to swap 1 with 0. It needs to be assembled with the Arduino according to this circuit (you can use any pins, this you indicate in the sketch).


Here's a view from the bottom. Two drive wheels with bevel gear and a swivel wheel:

Now you need to assemble a circuit that is mounted on the base. The diameter of the base should be about 30 cm so that both the electronics and the vacuum cleaner unit itself fit in there.

Instead of rangefinders, you can use an option with bumpers that are connected to limit switches. When colliding with an obstacle, the control system will give a signal to change the direction of movement.

You can make contact bumpers with your own hands; for this you need a thin but rigid wire, for example from a twisted pair. To do this, forms a contact pad on inside bumper made of foil, and secure the conductor as shown below. When the robot vacuum cleaner collides with furniture and walls, they will come into contact. All you have to do is adjust the distance from the wire to the foil to achieve the desired sensitivity and eliminate false positives. 5V is supplied to the foil, and the wire goes to the Arduino input, pulled to negative through a several kOhm resistor.

The device is powered by batteries; linear stabilizers such as l7805 can be used to power the control system. To adjust the rotation speed of the motors, a step-down converter, for example LM2596, is suitable.
The most difficult thing is to design and assemble a vacuum cleaner. Here is its approximate drawing:

We break off the original blades from the cooler and attach the turbine from the vacuum cleaner to its rotor. It is important to mount the turbine exactly in the center, otherwise you will get imbalance and vibration.

This is what the reverse side of the turbine mounted on the cooler rotor looks like. You can attach it with hot glue or superglue.

That's all step by step instructions on assembling a robot vacuum cleaner made from scrap materials. The algorithm of its operation is as follows: the robot vacuum cleaner moves forward until it encounters an obstacle. After a collision (or approach, if you use ultrasonic rangefinders), it stops, drives back a specified distance, turns at an arbitrary angle and moves on.
Idea No. 2: almost a factory robot
We bring to your attention no more complex project robot vacuum cleaner. Here is what it looks like when assembled:

The navigation system in it is assembled from a set of 6 IR obstacle sensors. In case none of them work, two contact sensors (limit switches) are provided. Motor control system based on the same driver with L298N chip. To assemble it you will need:
- Arduino board, the original used Pro-mini.
- USB-TTL adapter for flashing this Arduino model. If you use Arduino Nano, then it is not needed, because It has the ability to flash firmware via USB.
- Driver for L298N motors.
- Motors for wheels with gearbox.
- 6 IR sensors.
- Motors for the turbine (more powerful if possible).
- Vacuum cleaner turbine impeller.
- Motors for brushes can be anything.
- 2 collision sensors.
Collect all this according to this scheme:

To assemble the power circuit of the robot vacuum cleaner you need:
- 4 lithium batteries, suitable for 18650 type.
- 2 converters DC voltage(up and down).
- Controller for charging and discharging 2 batteries (search the Internet for 2s li-ion controller). The circuit uses the sequential connection of two parallel-connected cans, as a result, their output voltage is more than 7.4V, and a parallel chain is needed to increase the capacity and autonomy of operation.
Here is the power supply diagram for this robot:

In addition, you need plastic (PVC) or any other material for the robot body; you can print it on a 3D printer, if you have such an opportunity.
For the homemade product to work, you need firmware, here is an example of a chaotic cleaning algorithm, we took it from the network. Sketch download link: .
This article examined 2 designs of a robot vacuum cleaner that can be repeated and assembled with your own hands. Do automatic tool To clean the room, you can invest in a budget of 30 to 100 dollars. The most expensive parts are batteries, motors and Arduino boards. If you managed to collect homemade robot vacuum cleaner or you have come up with a different design, send examples in the comments, we will be glad to open communication!