§ 6. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ Основные формулы
Уравнение гармонических колебаний
где х - смещение колеблющейся точки от положения равновесия; t - время; А, ω, φ- соответственно амплитуда, угловая частота, начальная фаза колебаний; - фаза колебаний в момент t .
Угловая частота колебаний
где ν и Т - частота и период колебаний.
Скорость точки, совершающей гармонические колебания,
Ускорение при гармоническом колебании
Амплитуда А результирующего колебания, полученного при сложении двух колебаний с одинаковыми частотами, происходящих по одной прямой, определяется по формуле
где a 1 и А 2 - амплитуды составляющих колебаний; φ 1 и φ 2 - их начальные фазы.
Начальная фаза φ результирующего колебания может быть найдена из формулы
Частота биений, возникающих при сложении двух колебаний, происходящих по одной прямой с различными, но близкими по значению частотами ν 1 и ν 2 ,
Уравнение траектории точки, участвующей в двух взаимно перпендикулярных колебаниях с амплитудами A 1 и A 2 и начальными фазами φ 1 и φ 2 ,
Если начальные фазы φ 1 и φ 2 составляющих колебаний одинаковы, то уравнение траектории принимает вид
т. е. точка движется по прямой.
В том случае, если разность фаз , уравнение принимает вид
т. е. точка движется по эллипсу.
Дифференциальное уравнение гармонических колебаний материальной точки
Или , где m - масса точки; k - коэффициент квазиупругой силы (k =т ω 2).
Полная энергия материальной точки, совершающей гармонические колебания,
Период колебаний тела, подвешенного на пружине (пружинный маятник),
![]()
где m - масса тела; k - жесткость пружины. Формула справедлива для упругих колебаний в пределах, в которых выполняется закон Гука (при малой массе пружины в сравнении с массой тела).
Период колебаний математического маятника
где l - длина маятника; g - ускорение свободного падения. Период колебаний физического маятника
где J - момент инерции колеблющегося тела относительно оси
колебаний; а - расстояние центра масс маятника от оси колебаний;
Приведенная длина физического маятника.
Приведенные формулы являются точными для случая бесконечно малых амплитуд. При конечных амплитудах эти формулы дают лишь приближенные результаты. При амплитудах не более ошибка в значении периода не превышает 1 %.
Период крутильных колебаний тела, подвешенного на упругой нити,
где J - момент инерции тела относительно оси, совпадающей с упругой нитью; k - жесткость упругой нити, равная отношению упругого момента, возникающего при закручивании нити, к углу, на который нить закручивается.
Дифференциальное уравнение затухающих колебаний , или ,
где r - коэффициент сопротивления; δ - коэффициент затухания: ; ω 0 - собственная угловая частота колебаний *
Уравнение затухающих колебаний
где A (t) - амплитуда затухающих колебаний в момент t; ω - их угловая частота.
Угловая частота затухающих колебаний
![]()
О Зависимость амплитуды затухающих колебаний от времени
где А 0 - амплитуда колебаний в момент t =0.
Логарифмический декремент колебаний
где A (t) и A (t+T) - амплитуды двух последовательных колебаний, отстоящих по времени друг от друга на период.
Дифференциальное уравнение вынужденных колебаний
где - внешняя периодическая сила, действующая на колеблющуюся материальную точку и вызывающая вынужденные колебания; F 0 - ее амплитудное значение;
Амплитуда вынужденных колебаний
Резонансная частота и резонансная амплитуда и
Примеры решения задач
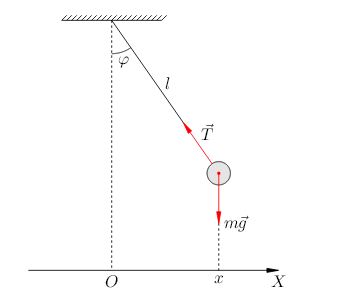
Пример 1. Точка совершает колебания по закону x(t)= , где А=2 см. Определить начальную фазу φ, если
x (0)= см и х , (0)<0. Построить векторную диаграмму для мо- мента t =0.
Решение. Воспользуемся уравнением движения и выразим смещение в момент t =0 через начальную фазу:
Отсюда найдем начальную фазу:
![]()
* В приведенных ранее формулах гармонических колебаний та же величина обозначалась просто ω (без индекса 0).
Подставим
в это выражение заданные значения x
(0)
и А:
φ=
=![]() .
Значению аргумента
удовлетворяют
два
значения угла:
.
Значению аргумента
удовлетворяют
два
значения угла:
Для того чтобы решить, какое из этих значений угла φ удовлет- воряет еще и условию , найдем сначала :
Подставив в это выражение значение t =0 и поочередно значения начальных фаз и , найдем
Т ак
как всегда A
>0
и ω>0,
то условию удовлетворяет
толь
ко
первое значение начальной фазы.
Таким
образом, искомая начальная
фаза
ак
как всегда A
>0
и ω>0,
то условию удовлетворяет
толь
ко
первое значение начальной фазы.
Таким
образом, искомая начальная
фаза
По найденному значению φ постро- им векторную диаграмму (рис. 6.1). Пример 2. Материальная точка массой т =5 г совершает гармоничес- кие колебания с частотой ν =0,5 Гц. Амплитуда колебаний A =3 см. Оп- ределить: 1) скорость υ точки в мо- мент времени, когда смещение х= = 1,5 см; 2) максимальную силу F max , действующую на точку; 3) Рис. 6.1 полную энергию Е колеблющейся точ ки.
а формулу скорости получим, взяв первую производную по времени от смещения:
Чтобы выразить скорость через смещение, надо исключить из формул (1) и (2) время. Для этого возведем оба уравнения в квадрат, разделим первое на А 2 , второе на A 2 ω 2 и сложим:
Решив последнее уравнение относительно υ, найдем
Выполнив вычисления по этой формуле, получим
Знак плюс соответствует случаю, когда направление скорости совпадает с положительным направлением оси х, знак минус - когда направление скорости совпадает с отрицательным направлением оси х.
Смещение при гармоническом колебании кроме уравнения (1) может быть определено также уравнением
Повторив с этим уравнением такое же решение, получим тот же ответ.
2. Силу действующую на точку, найдем по второму закону Ньютона:
где а - ускорение точки, которое получим, взяв производную по времени от скорости:
Подставив выражение ускорения в формулу (3), получим
Отсюда максимальное значение силы
![]()
Подставив в это уравнение значения величин π, ν, т и A, найдем
3. Полная энергия колеблющейся точки есть сумма кинетической и потенциальной энергий, вычисленных для любого момента времени.
Проще всего вычислить полную энергию в момент, когда кинетическая энергия достигает максимального значения. В этот момент потенциальная энергия равна нулю. Поэтому полная энергия E колеблющейся точки равна максимальной кинетической энергии
Максимальную скорость определим из формулы (2), положив : . Подставив выражение скорости в фор- мулу (4), найдем
Подставив значения величин в эту формулу и произведя вычисления, получим
или мкДж.
Пример 3. На концах тонкого стержня длиной l = 1 м и массой m 3 =400 г укреплены шарики малых размеров массами m 1 =200 г и m 2 =300г. Стержень колеблется около горизонтальной оси, перпен-
дикулярной стержню и проходящей через его середину (точка О на рис. 6.2). Определить период Т колебаний, совершаемых стержнем.
Решение. Период колебаний физического маятника, каким является стержень с шариками, определяется соотношением
где J - т - его масса; l С - расстояние от центра масс маятника до оси.
Момент инерции данного маятника равен сумме моментов инерции шариков J 1 и J 2 и стержня J 3:
Принимая шарики за материальные точки, выразим моменты их инерции:
Так как ось проходит через середину стержня, то его момент инерции относительно этой оси J 3 = = . Подставив полученные выражения J 1 , J 2 и J 3 в формулу (2), найдем общий момент инерции фи- зического маятника:
Произведя вычисления по этой формуле, найдем
Рис. 6.2 Масса маятника состоит из масс шариков и массы стержня:
Расстояние l С центра масс маятника от оси колебаний найдем, исходя из следующих соображений. Если ось х направить вдоль стержня и начало координат совместить с точкой О, то искомое расстояние l равно координате центра масс маятника, т. е.
Подставив значения величин m 1 , m 2 , m , l и произведя вычисления, найдем
Произведя расчеты по формуле (1), получим период колебаний физического маятника:
Пример 4. Физический маятник представляет собой стержень длиной l = 1 м и массой 3т 1 с прикрепленным к одному из его концов обручем диаметром и массой т 1 . Горизонтальная ось Oz
маятника проходит через середину стержня перпендикулярно ему (рис. 6.3). Определить период Т колебаний такого маятника.
Решение. Период колебаний физического маятника определяется по формуле

где J - момент инерции маятника относительно оси колебаний; т - его масса; l C - расстояние от центра масс маятника до оси колебаний.
Момент инерции маятника равен сумме моментов инерции стержня J 1 и обруча J 2:
Момент инерции стержня относительно оси, перпендикулярной стержню и проходящей через его центр масс, определяется по форму- ле . В данном случае т= 3т 1 и
Момент инерции обруча найдем, восполь- зовавшись теоремой Штейнера , где J - момент инерции относительно про- извольной оси; J 0 - момент инерции отно- сительно оси, проходящей через центр масс параллельно заданной оси; а - расстояние между указанными осями. Применив эту фор- мулу к обручу, получим
Подставив выражения J 1 и J 2 в формулу (2), найдем момент инерции маятника относительно оси вращения:
Расстояние l С от оси маятника до его центра масс равно
Подставив в формулу (1) выражения J , l с и массы маятника , найдем период его колебаний:
После вычисления по этой формуле получим T =2,17 с.
Пример 5. Складываются два колебания одинакового направле- ния, выражаемых уравнениями ; х 2 = =, где А 1 = 1 см, A 2 =2 см, с, с, ω = =. 1. Определить начальные фазы φ 1 и φ 2 составляющих коле-
баний. 2. Найти амплитуду А и начальную фазу φ результирующего колебания. Написать уравнение результирующего колебания.
Решение. 1. Уравнение гармонического колебания имеет вид
Преобразуем уравнения, заданные в условии задачи, к такому же виду:

Из сравнения выражений (2) с равенством (1) находим начальные фазы первого и второго колебаний:
Рад и рад.
2. Для определения амплитуды А результирующего колебания удобно воспользоваться векторной диаграммой, представленной на рис. 6.4. Согласно теореме косинусов, получим
где - разность фаз составляющих колебаний. Так как , то, подставляя найденные значения φ 2 и φ 1 получим рад.
Подставим значения А 1 , А 2 и в формулу (3) и произведем вычисления:
A = 2,65 см.
Тангенс
начальной фазы φ
результирующего колебания опреде-
лим
непосредственно из рис. 6.4:
![]() , отку-
да
начальная фаза
, отку-
да
начальная фаза
![]()
Подставим значения А 1 , А 2 , φ 1 , φ 2 и произведем вычисления:
Так как угловые частоты складываемых колебаний одинаковы, то результирующее колебание будет иметь ту же частоту ω. Это позволяет написать уравнение результирующего колебания в виде , где A =2,65 см, , рад.
Пример 6. Материальная точка участвует одновременно в двух взаимно перпендикулярных гармонических колебаниях, уравнения которых
где a 1 = 1 см, A 2 =2 см, . Найти уравнение траектории точ- ки. Построить траекторию с соблюдением масштаба и указать направление движения точки.
Решение. Чтобы найти уравнение траектории точки, исключим время t из заданных уравнений (1) и (2). Для этого восполь-
зуемся формулой . В данном случае , поэтому
Так
как согласно формуле (1)
![]() ,
то уравнение траекто-
рии
,
то уравнение траекто-
рии
Полученное выражение представляет собой уравнение параболы, ось которой совпадает с осью Ох. Из уравнений (1) и (2) следует, что смещение точки по осям координат ограничено и заключено в пределах от -1 до +1 см по оси Ох и от -2 до +2 см по оси Оу.
Для построения траектории найдем по уравнению (3) значения у, соответствующие ряду значений х, удовлетворяющих условию см, и составим таблицу:
|
X , СМ |
||||||

Начертив координатные оси и выбрав масштаб, нанесем на плоскость хОу найденные точки. Соединив их плавной кривой, получим траекторию точки, совершающей колебания в соответствии с уравнениями движения (1) и (2) (рис. 6.5).
Для того чтобы указать направление движения точки, проследим за тем, как изменяется ее положение с течением времени. В начальный момент t =0 координаты точки равны x (0)=1 см и y (0)=2 см. В последующий момент времени, например при t 1 =l с, координаты точек изменятся и станут равными х (1)= -1 см, y(t)=0. Зная положения точек в начальный и последующий (близкий) моменты времени, можно указать направление движения точки по траектории. На рис. 6.5 это направление движения указано стрелкой (от точки А к началу координат). После того как в момент t 2 = 2 с колеблющаяся точка достигнет точки D, она будет двигаться в обратном направлении.
Задачи
Кинематика гармонических колебаний
6.1. Уравнение колебаний точки имеет вид , где ω=π с -1 , τ=0,2 с. Определить период Т и начальную фазу φ колебаний.
6.2. Определить период Т, частоту v и начальную фазу φ колебаний, заданных уравнением , где ω=2,5π с -1 , τ=0,4 с.
6.3. Точка совершает колебания по закону , где A х(0)=2 см и ; 2) х(0) =см и ; 3) х(0)=2см и ; 4) х(0)= и . Построить векторную диаграмму для момента t =0.
6.4. Точка совершает колебания.по закону , где A =4 см. Определить начальную фазу φ, если: 1) х(0) = 2 см и ; 2) x (0)= см и ; 3) х (0)= см и ; 4) x (0)=см и . Построить векторную диаграмму для момента t =0.
Темы кодификатора ЕГЭ: гармонические колебания; амплитуда, период, частота, фаза колебаний; свободные колебания, вынужденные колебания, резонанс.
Колебания - это повторяющиеся во времени изменения состояния системы. Понятие колебаний охватывает очень широкий круг явлений.
Колебания механических систем, или механические колебания - это механическое движение тела или системы тел, которое обладает повторяемостью во времени и происходит в окрестности положения равновесия. Положением равновесия называется такое состояние системы, в котором она может оставаться сколь угодно долго, не испытывая внешних воздействий.
Например, если маятник отклонить и отпустить, то начнутся колебания. Положение равновесия - это положение маятника при отсутствии отклонения. В этом положении маятник, если его не трогать, может пребывать сколь угодно долго. При колебаниях маятник много раз проходит положение равновесия.
Сразу после того, как отклонённый маятник отпустили, он начал двигаться, прошёл положение равновесия, достиг противоположного крайнего положения, на мгновение остановился в нём, двинулся в обратном направлении, снова прошёл положение равновесия и вернулся назад. Совершилось одно полное колебание . Дальше этот процесс будет периодически повторяться.
Амплитуда колебаний тела - это величина его наибольшего отклонения от положения равновесия.
Период колебаний - это время одного полного колебания. Можно сказать, что за период тело проходит путь в четыре амплитуды.
Частота колебаний - это величина, обратная периоду: . Частота измеряется в герцах (Гц) и показывает, сколько полных колебаний совершается за одну секунду.
Гармонические колебания.
Будем считать, что положение колеблющегося тела определяется одной-единственной координатой . Положению равновесия отвечает значение . Основная задача механики в данном случае состоит в нахождении функции , дающей координату тела в любой момент времени.
Для математического описания колебаний естественно использовать периодические функции. Таких функций много, но две из них - синус и косинус - являются самыми важными. У них много хороших свойств, и они тесно связаны с широким кругом физических явлений.
Поскольку функции синус и косинус получаются друг из друга сдвигом аргумента на , можно ограничиться только одной из них. Мы для определённости будем использовать косинус.
Гармонические колебания - это колебания, при которых координата зависит от времени по гармоническому закону:
(1)
Выясним смысл входящих в эту формулу величин.
Положительная величина является наибольшим по модулю значением координаты (так как максимальное значение модуля косинуса равно единице), т. е. наибольшим отклонением от положения равновесия. Поэтому - амплитуда колебаний.
Аргумент косинуса называется фазой колебаний. Величина , равная значению фазы при , называется начальной фазой. Начальная фаза отвечает начальной координате тела: .
Величина называется циклической частотой . Найдём её связь с периодом колебаний и частотой . Одному полному колебанию отвечает приращение фазы, равное радиан: , откуда
(2)
(3)
Измеряется циклическая частота в рад/с (радиан в секунду).
В соответствии с выражениями (2) и (3) получаем ещё две формы записи гармонического закона (1) :
График функции (1) , выражающей зависимость координаты от времени при гармонических колебаниях, приведён на рис. 1 .
Гармонический закон вида (1) носит самый общий характер. Он отвечает, например, ситуации, когда с маятником совершили одновременно два начальных действия: отклонили на величину и придали ему некоторую начальную скорость. Имеются два важных частных случая, когда одно из этих действий не совершалось.
Пусть маятник отклонили, но начальной скорости не сообщали (отпустили без начальной скорости). Ясно, что в этом случае , поэтому можно положить . Мы получаем закон косинуса:
График гармонических колебаний в этом случае представлен на рис. 2 .
 |
| Рис. 2. Закон косинуса |
Допустим теперь, что маятник не отклоняли, но ударом сообщили ему начальную скорость из положения равновесия. В этом случае , так что можно положить . Получаем закон синуса:
График колебаний представлен на рис. 3 .
 |
| Рис. 3. Закон синуса |
Уравнение гармонических колебаний.
Вернёмся к общему гармоническому закону (1) . Дифференцируем это равенство:
. (4)
Теперь дифференцируем полученное равенство (4) :
. (5)
Давайте сопоставим выражение (1) для координаты и выражение (5) для проекции ускорения. Мы видим, что проекция ускорения отличается от координаты лишь множителем :
. (6)
Это соотношение называется уравнением гармонических колебаний . Его можно переписать и в таком виде:
. (7)
C математической точки зрения уравнение (7)
является дифференциальным уравнением
. Решениями дифференциальных уравнений служат функции (а не числа, как в обычной алгебре).
Так вот, можно доказать, что:
Решением уравнения (7) является всякая функция вида (1) с произвольными ;
Никакая другая функция решением данного уравнения не является.
Иными словами, соотношения (6) , (7) описывают гармонические колебания с циклической частотой и только их. Две константы определяются из начальных условий - по начальным значениям координаты и скорости.
Пружинный маятник.
Пружинный маятник - это закреплённый на пружине груз, способный совершать колебания в горизонтальном или вертикальном направлении.
Найдём период малых горизонтальных колебаний пружинного маятника (рис. 4 ). Колебания будут малыми, если величина деформации пружины много меньше её размеров. При малых деформациях мы можем пользоваться законом Гука. Это приведёт к тому, что колебания окажутся гармоническими.
Трением пренебрегаем. Груз имеет массу , жёсткость пружины равна .
Координате отвечает положение равновесия, в котором пружина не деформирована. Следовательно, величина деформации пружины равна модулю координаты груза.
 |
| Рис. 4. Пружинный маятник |
В горизонтальном направлении на груз действует только сила упругости со стороны пружины. Второй закон Ньютона для груза в проекции на ось имеет вид:
. (8)
Если (груз смещён вправо, как на рисунке), то сила упругости направлена в противоположную сторону, и . Наоборот, если , то . Знаки и всё время противоположны, поэтому закон Гука можно записать так:
Тогда соотношение (8) принимает вид:
Мы получили уравнение гармонических колебаний вида (6) , в котором
Циклическая частота колебаний пружинного маятника, таким образом, равна:
. (9)
Отсюда и из соотношения находим период горизонтальных колебаний пружинного маятника:
. (10)
Если подвесить груз на пружине, то получится пружинный маятник, совершающий колебания в вертикальном направлении. Можно показать, что и в этом случае для периода колебаний справедлива формула (10) .
Математический маятник.
Математический маятник - это небольшое тело, подвешенное на невесомой нерастяжимой нити (рис. 5 ). Математический маятник может совершать колебания в вертикальной плоскости в поле силы тяжести.
 |
| Рис. 5. Математический маятник |
Найдём период малых колебаний математического маятника. Длина нити равна . Сопротивлением воздуха пренебрегаем.
Запишем для маятника второй закон Ньютона:
и спроектируем его на ось :
Если маятник занимает положение как на рисунке (т. е. ), то:
Если же маятник находится по другую сторону от положения равновесия (т. е. ), то:
Итак, при любом положении маятника имеем:
. (11)
Когда маятник покоится в положении равновесия, выполнено равенство . При малых колебаниях, когда отклонения маятника от положения равновесия малы (по сравнению с длиной нити), выполнено приближённое равенство . Воспользуемся им в формуле (11) :
Это - уравнение гармонических колебаний вида (6) , в котором
Следовательно, циклическая частота колебаний математического маятника равна:
. (12)
Отсюда период колебаний математического маятника:
. (13)
Обратите внимание, что в формулу (13) не входит масса груза. В отличие от пружинного маятника, период колебаний математического маятника не зависит от его массы.
Свободные и вынужденные колебания.
Говорят, что система совершает свободные колебания
, если она однократно выведена из положения равновесия и в дальнейшем предоставлена сама себе. Никаких периодических внешних
воздействий система при этом не испытывает, и никаких внутренних источников энергии, поддерживающих колебания, в системе нет.
Рассмотренные выше колебания пружинного и математического маятников являются примерами свободных колебаний.
Частота, с которой совершаются свободные колебания, называется собственной частотой колебательной системы. Так, формулы (9) и (12) дают собственные (циклические) частоты колебаний пружинного и математического маятников.
В идеализированной ситуации при отсутствии трения свободные колебания являются незатухающими, т. е. имеют постоянную амплитуду и длятся неограниченно долго. В реальных колебательных системах всегда присутствует трение, поэтому свободные колебания постепенно затухают (рис. 6 ).
Вынужденные колебания - это колебания, совершаемые системой под воздействием внешней силы , периодически изменяющейся во времени (так называемой вынуждающей силы).
Предположим, что собственная частота колебаний системы равна , а вынуждающая сила зависит от времени по гармоническому закону:
В течение некоторого времени происходит установление вынужденных колебаний: система совершает сложное движение, которое является наложением выужденных и свободных колебаний. Свободные колебания постепенно затухают, и в установившемся режиме система совершает вынужденные колебания, которые также оказываются гармоническими. Частота установившихся вынужденных колебаний совпадает с частотой
вынуждающей силы (внешняя сила как бы навязывает системе свою частоту).
Амплитуда установившихся вынужденных колебаний зависит от частоты вынуждающей силы. График этой зависимости показан на рис. 7 .
 |
| Рис. 7. Резонанс |
Мы видим, что вблизи частоты наступает резонанс - явление возрастания амплитуды вынужденных колебаний. Резонансная частота приближённо равна собственной частоте колебаний системы: , и это равенство выполняется тем точнее, чем меньше трение в системе. При отсутствии трения резонансная частота совпадает с собственной частотой колебаний, , а амплитуда колебаний возрастает до бесконечности при .
Колебаниями называются движения или процессы, которые характеризуются опреде-ленной повторяемостью во времени. Колебательные процессы широко распространены в природе и технике, например качание маятника часов, переменный электрический ток и т. д. При колебательном движении маятника изменяется координата его центра масс, в случае переменного тока колеблются напряжение и ток в цепи. Физическая природа колебаний может быть разной, поэтому различают колебания механические, электро-магнитные и др. Однако различные колебательные процессы описываются одинаковы-ми характеристиками и одинаковыми уравнениями. Отсюда следует целесообразность единого подхода к изучению колебаний различной физической природы.
Колебания называются свободными , если они совершаются только под воздействием внутренних сил, действующих между элементами системы, после того как система выведена из положения равновесия внешними силами и предоставлена самой себе. Свободные колебания всегда затухающие колебания , ибо в реальных системах неизбежны потери энергии. В идеализированном случае системы без потерь энергии свободные колебания (продолжающиеся как угодно долго) называются собственными .
Простейшим типом свободных незатухающих колебаний являются гармонические колебания - колебания, при которых колеб-лющаяся величина изменяется со временем по закону синуса (косинуса). Колебания, встречающиеся в природе и технике, часто имеют характер, близкий к гармоническому.
Гармонические колеба-ния описываются уравнением, которое называется уравнением гармонических колебаний:
где А - амплитуда колебаний, максимальное значение колеблющейся величины х ; - круговая (циклическая) частота собственных колебаний; - начальная фаза колебания в мо-мент времени t = 0; - фаза колебания в момент времени t. Фаза колебания определяет значение колеблющейся величины в данный момент времени. Так как косинус изменяется в пределах от +1 до -1, то х может принимать значения от +A до -А .
Время T , за которое система совершает одно полное колебание, называется периодом колебаний . За время Т фаза колебания получает приращение 2π , т. е.
Откуда . (14.2)
Величина , обратная периоду колебаний
т. е. число полных колебаний, совершаемых в единицу времени, называется частотой колебаний. Сравнивая (14.2) и (14.3) получим
Единица частоты - герц (Гц): 1 Гц - частота, при кото-рой за 1с совершается одно полное колебание.
Системы, в которых могут происходить свободные колебания, называются осцилляторами . Какими же свойствами должна обладать система, чтобы в ней могли возникнуть свободные колебания? Механическая система должна иметь положение устойчивого равновесия , при выходе из которого появляется возвращающая сила, направленная к положению равновесия . Этому положению соответствуют, как известно, минимум потенциальной энергии системы. Рассмотрим несколько колебательных систем, удовлетворяющих перечисленным свойствам.
Гармоническое колебание - явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса. Например, гармонически колеблется величина, изменяющаяся во времени следующим образом:
где х - значение изменяющейся величины, t - время, остальные параметры - постоянные: А - амплитуда колебаний, ω - циклическая частота колебаний, - полная фаза колебаний, - начальная фаза колебаний.
Обобщенное гармоническое колебание в дифференциальном виде
![]()
(Любое нетривиальное решение этого дифференциального уравнения - есть гармоническое колебание с циклической частотой )
Виды колебаний
Свободные колебания совершаются под действием внутренних сил системы после того, как система была выведена из положения равновесия. Чтобы свободные колебания были гармоническими, необходимо, чтобы колебательная система была линейной (описывалась линейными уравнениями движения), и в ней отсутствовала диссипация энергии (последняя вызвала бы затухание).
Вынужденные колебания совершаются под воздействием внешней периодической силы. Чтобы они были гармоническими, достаточно чтобы колебательная система была линейной (описывалась линейными уравнениями движения), а внешняя сила сама менялась со временем как гармоническое колебание (то есть чтобы зависимость от времени этой силы была синусоидальной).
Уравнение гармонических колебаний
|
Уравнение (1)
|
дает зависимость колеблющейся величины S от времени t; это и есть уравнение свободных гармонических колебаний в явном виде. Однако обычно под уравнением колебаний понимают иную запись этого уравнения, в дифференциальной форме. Возьмем для определенности уравнение (1) в виде
![]()
дважды продифференцируем его по времени:
![]()
![]()
Видно, что выполняется следующее соотношение:
которое и называется уравнением свободных гармонических колебаний (в дифференциальной форме). Уравнение (1) является решением дифференциального уравнения (2). Поскольку уравнение (2) - дифференциальное уравнение второго порядка, необходимы два начальных условия для получения полного решения (то есть определения входящих в уравнение (1) констант A и ); например, положение и скорость колебательной системы при t = 0.
Математи́ческий ма́ятник - осциллятор, представляющий собой механическую систему, состоящую изматериальной точки, находящейся на невесомой нерастяжимой нити или на невесомом стержне в однородном поле сил тяготения. Период малых собственных колебаний математического маятника длины l неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения g равен
и не зависит от амплитуды и массы маятника.
Физический маятник - осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Имеют математическое выражение. Их свойства характеризует совокупность тригонометрических уравнений, сложность которых определяется сложностью самого колебательного процесса, свойствами системы и средой, в которой они происходят, т.е., внешними факторами, воздействующими на колебательный процесс.
Например, в механике гармоническое колебание представляет собой движение, которому свойственны:
Прямолинейный характер;
Неравномерность;
Перемещение физического тела, которое происходит по синусоидальной или косинусоидальной траектории, а зависимости от времени.
Исходя из данных свойств, можно привести уравнение гармонических колебаний, которое имеет вид:
x = A cos ωt или же вид x = A sin ωt, где х - значение координаты, А - значение амплитуды колебания, ω - коэффициент.
Такое уравнение гармонических колебаний является основным для всех гармонических колебаний, которые рассматриваются в кинематике и механике.
Показатель ωt, который в данной формуле стоит под знаком тригонометрической функции, именуют фазой, и она определяет местоположение колеблющейся материальной точки в данный конкретный момент времени при заданной амплитуде. При рассмотрении циклических колебаний данный показатель равен 2л, он показывает количество в пределах временного цикла и обозначается w. В этом случае уравнение гармонических колебаний содержит его как показатель величины циклической (круговой) частоты.
Рассматриваемое нами уравнение гармонических колебаний, как уже отмечалось, может принимать различные виды, в зависимости от ряда факторов. Например, вот такой вариант. Чтобы рассмотреть свободных гармонических колебаний, следует учитывать то, что им всем свойственно затухание. В различных это явление проявляется по-разному: остановка движущегося тела, прекращение излучения в электрических системах. Простейшим примером, показывающим уменьшение колебательного потенциала, выступает его преобразование в тепловую энергию.
Рассматриваемое уравнение имеет вид: d²s/dt² + 2β х ds/dt + ω²s = 0. В этой формуле: s - значение колеблющейся величины, которая характеризует свойства той или иной системы, β - константа, показывающая коэффициент затухания, ω - циклическая частота.
Использование такой формулы позволяет подходить к описанию колебательных процессов в линейных системах с единой точки зрения, а также производить конструирование и моделирование колебательных процессов на научно-экспериментальном уровне.
К примеру, известно, что на заключительном этапе своего проявления уже перестают быть гармоническими, то есть категории частоты и периода для них становятся просто бессмысленными и в формуле не отражаются.
Классическим способом исследования гармонических колебаний выступает В простейшем виде он представляет систему, которую описывает такое дифференциальное уравнение гармонических колебаний: ds/dt + ω²s = 0. Но многообразие колебательных процессов естественным образом приводит к тому, что существует большое количество осцилляторов. Перечислим их основные типы:
Пружинный осциллятор - обычный груз, обладающий некой массой m, который подвешен на упругой пружине. Он совершает гармонического типа, которые описываются формулой F = - kx.
Физический осциллятор (маятник) - твердое тело, совершающее колебательные движения вокруг статичной оси под воздействием определенной силы;
- (в природе практически не встречается). Он представляет собой идеальную модель системы, включающей колеблющееся физическое тело, обладающее определенной массой, которое подвешено на жесткой невесомой нити.



